
Dalam mempelajari keterampilan motorik menurut Fitts & Possner (1967) [1][2]menyatakan bahwa proses belajar ada tiga fase/tahapan pembelajaran yaitu: tahap kognitif (Cognitive phase), tahap asosiatif (Associative phase) dan tahap otomatisasi (Autonomous phase). Tahapan tersebut dapat digambarkan sebagai berikut:
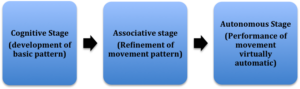
Gambar 1. Tahapan proses keterampilan motorik menurut Fitts & Possner (1967) [3].
Tujuan belajar adalah untuk secara bertahap mengotomatisasi keterampilan melalui tahapan tersebut. Pada tahap kognitif peserta didik berkonsentrasi pada melakukan suatu keterampilan. Fokusnya adalah pada menemukan apa yang harus dilakukan. Pada tahan ini biasanya ada variabilitas yang tinggi dari sejumlah besar kesalahan dalam kinerja/penampilan (performance), karena pelajar sedang mencoba berbagai cara untuk memecahkan masalah (problem solving). Oleh karena itu, pentingnya penggunaan instruksi verbal dan model (demonstration) sangat diperlukan. Jadi, umpan balik tambahan sangat bermanfaat selama tahap pembelajaran ini. Seperti di ungkapkan juga oleh Amezdros, dkk, menyatakan bahwa “feedback is very important in the early learning stage of any skill” [4]. Sebagai pemula, sangat dibutuhkan umpan balik eksternal atau dari luar. Instruksi berupa umpan balik dapat membantu pelajar untuk melihat kesamaan elemen antara tugas-tugas yang sebelumnya dipelajari dan tugas baru yang harus dipelajari, dan demonstrasi atau model visual juga dapat memberikan informasi kepada seorang pelajar tentang pola gerakan yang diinginkan.
Yang kedua, yaitu tahap asosoiatif. pada tahap ini, pelajar mampu mendeteksi dan memperbaiki kesalahan kinerja/penampilan (performance). Pelajar berfokus pada dinamika keterampilan dalam rangka untuk memperhalus dan memperbaiki gerakan.[5]Pelajar juga menunjukkan konsistensi lebih dan efisiensi dalam kinerja/penampilan karena untuk perbaikan keterampilan menjadi lebih halus. Dalam fase ini, umpan balik dan instruksi harus lebih tepat dan fokus pada aspek-aspek dari gerakan pelajar untuk memperbaikinya.
Tahap yang ketiga yaitu tahap otonom, pada tahap ini dapat dicapai setelah latihan ekstensif. Pada tahap ini, pelajar tidak harus berkonsentrasi pada keterampilan dan mampu melakukan keterampilan tanpa memperhatikan gerakan itu sendiri. Dalam tahap ini pelaku hanya membuat kesalahan kecil namun sekarang mampu mendeteksi dan mengoreksi diri mereka dan menghasilkan kinerja yang optimal. Peningkatan kinerja/penampilan agak sulit untuk dideteksi selama tahap ini, dimana pelajar mencapai batas kemampuan nya. Ketika kinerja ditandai dengan otomatisasi, hal itu memungkinkan peserta didik untuk memproses informasi dari aspek-aspek lain dari tugas, seperti strategi, atau bentuk gaya (style) suatu gerakan. Yang perlu diperhatikan, pada tahap ini dikatakan pembelajar menjadi tidak terdorong (discouraged) dan kehilangan motivasi (lose motivation).[6]Oleh karena itu, praktisi dalam hal ini guru atau pelatih pada kapasitasnya harus memberikan motivasi untuk mencapai potensi pembelajar.
[1] Coker, Cheryl A. Motor Learning and Control for Practitioners (Mc Graw-Hill: Americas, New York, 2004), h. 100.
[2] Schmid, R. A, Motor Control and Learning. A Bihavioral Emphasis (Champaighn, IL. Human Kinetics, 1988), h. 460.
[4] Amezdros et all, Queensland senior, Physical education, 2ndedition (Australia: Macmilan Education Australia PTY LTD, 2004), h. 111.